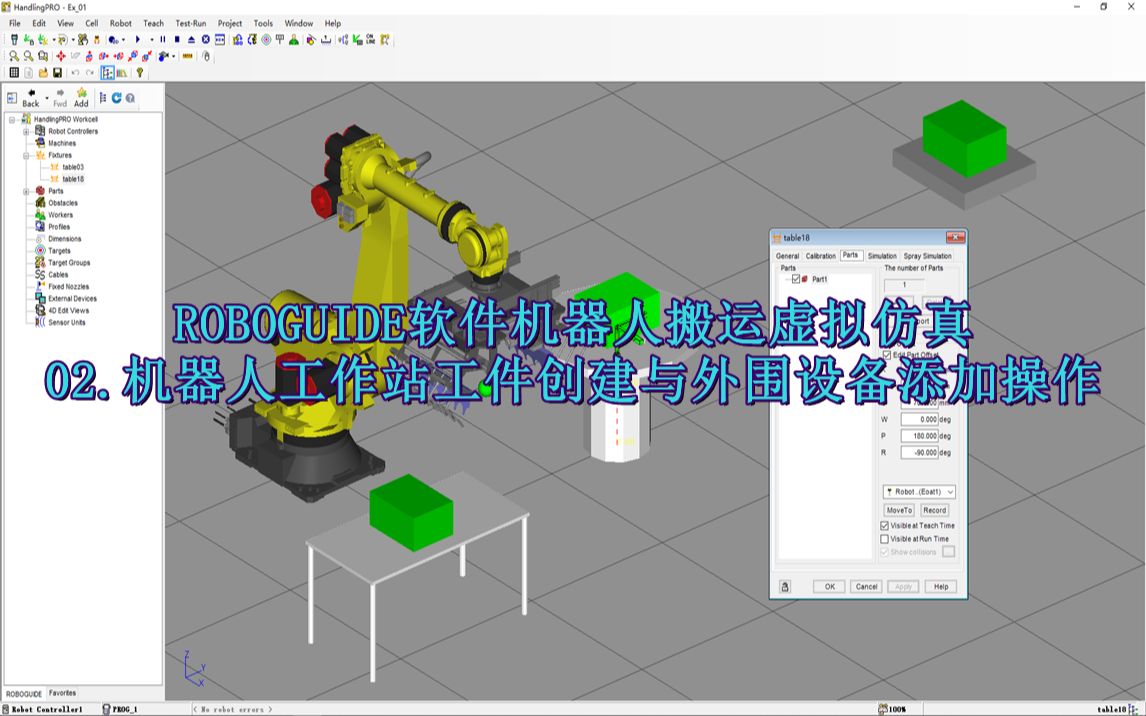
ROBOGUIDE是FANUC機器人系統集成的虛擬仿真軟件,廣泛應用于機器人搬運、焊接、噴涂等工業場景的離線編程和動態模擬。在搬運應用中,ROBOGUIDE允許用戶在虛擬環境中創建完整的機器人工作站,包括工件模型和外圍設備,從而優化機器人路徑、驗證操作邏輯并減少實際調試時間。以下是工件創建與外圍設備添加的關鍵操作步驟。
工件創建是構建搬運工作站的基礎。在ROBOGUIDE中,用戶首先通過CAD導入或內置建模工具生成工件模型。對于搬運應用,工件通常代表被機器人抓取和移動的物體,如箱子、零件或托盤。創建工件時,需定義其幾何形狀、尺寸和物理屬性(如質量、質心位置),這些參數影響機器人的負載計算和運動規劃。在工件設置完成后,用戶可將其放置在工作站中的初始位置,并指定目標位置,以模擬搬運任務。
外圍設備添加是提升仿真真實性的關鍵步驟。在搬運應用中,外圍設備包括傳送帶、傳感器、夾具、安全圍欄等,它們與機器人協同工作,實現自動化流程。在ROBOGUIDE中,用戶可從設備庫選擇標準模型或導入自定義設備。例如,添加傳送帶時,需設置其速度、方向和觸發條件,以模擬工件輸送;而添加夾具時,則需配置其開合動作,并與機器人控制器同步。傳感器(如光電傳感器)可被用于檢測工件位置,觸發機器人動作,從而模擬真實世界的交互邏輯。
操作流程中,用戶需通過ROBOGUIDE的圖形界面進行設備布局和參數配置。例如,在添加外圍設備后,通過I/O信號映射連接設備與機器人控制器,確保仿真中的通信與實際系統一致。用戶可利用仿真功能測試設備協同性,如驗證夾具在抓取工件時是否與傳送帶同步,避免碰撞或時序錯誤。這一過程不僅提高了編程效率,還降低了現場調試風險。
ROBOGUIDE的工件創建和外圍設備添加功能為機器人搬運應用提供了全面的虛擬仿真解決方案。通過精確建模和動態測試,用戶可以在投入實際生產前優化工作站布局和程序邏輯,顯著提升自動化系統的可靠性和效率。